金桔
金币
威望
贡献
回帖0
精华
在线时间 小时
|
这大部分模态分解方法和盲源分离方法都将失效,试试Void-Kalman滤波方法吧,也不一定能成功
1993 年, VOLD 和 LEURIDAN 以现代控制理论中的卡尔曼滤波原理为理论基础, 提出了 Vold -Kalman 跟踪滤波方法, 开创了在时域中直接提取阶比分量的先河,Vold-Kalman阶次追踪可以提取多个阶次分量,其解耦临近和交叉阶次的准确性也较好,在很多领域得到了广泛应用。

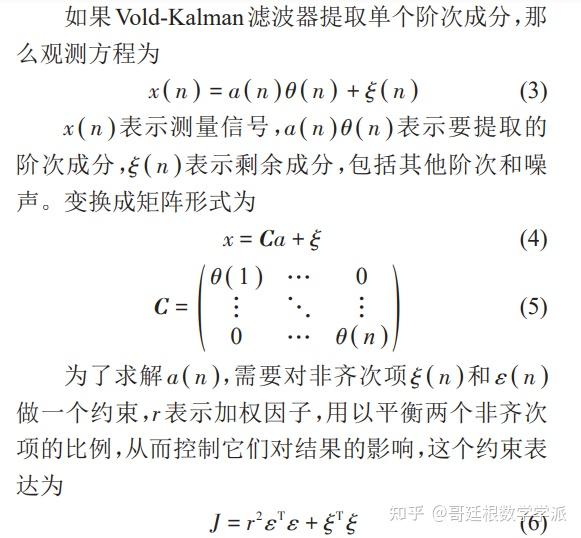
为了追踪目标阶次的信号,构建状态方程和观测方程,信号模型用幅值和载波乘积的形式表达,通过求得的包络幅值重构阶次信号。将阶次信号模型表示为幅值和载波的乘积:

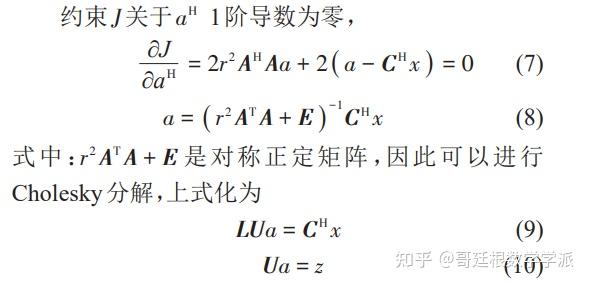
先通过向前分解求出z,再通过向后代入求a,由此完成对包含多重分量复杂信号的阶比分量提取。提取出的单个阶比的信号往往可以对应到分析场中的局部特征,通过对阶比信号追踪分析,就可对信号的各个子特征进行识别。
首先导入相关模块
import numpy as np
from scipy import sparse
from scipy.linalg import pascal
from scipy.sparse import linalg
import matplotlib.pyplot as plt
import time定义Void-Kalman函数
def vkf(y,fs,f,p=None,bw=None,multiorder=None,solver='scipy-spsolve'):
"""
参数
----------
y : 输入信号
fs :采样频率
f : 信号y的频率序列[f_1,...,f_K]
p : p 阶滤波器(通常在 1 或 4 之间)
bw : 带宽,默认为bw=fs/100
multiorder : 算法的阶数
solver : 'scikits-spsolve' (faster) or 'scipy-spsolve' (slower)
返回值
-------
x : 复包络
c : 相位
"""
if type(p)==type(None):
p = 2#Default filter order
if type(bw) ==type(None):
bw = fs/100 #Default bandwidth: 0.01*fs
if type(multiorder)==type(None):
multiord = True #Default single-order algorithm
else:
multiord = multiorder
silent=False
if len(np.array(y).shape)>1:
if np.array(y).shape[1] > np.array(y).shape[0]:
y = np.transpose(np.array(y))
else:
y = np.array(y)
if np.size(bw)!=1:
if np.array(bw).shape[1] > np.array(bw).shape[0]:
bw = np.transpose(np.array(bw))
else:
bw = np.array(bw)
if silent ==False:
print('preparing array ok')
#Signal
n_t = len(y)
#频率向量
(n_f, n_ord) = f.shape
if n_f == 1:
f1 = np.ones(n_t,1)*f
raise Warning('error:', f1)
elif n_f != n_t:
raise Warning('The array in f should have 1 or {} elements.'.format(n_t))
#将频率向量转换为相位向量
c = np.exp(2j*np.pi*np.cumsum(f,axis=0)/fs)
#带宽向量
n_bw = np.size(bw)
if n_bw == 1:
bw = np.ones((n_t,1))*bw
elif n_bw != n_t:
raise Warning('The array bw should have 1 or {} elements.'.format(n_t))
#以弧度为单位的相对带宽
phi = np.pi/fs*bw
#滤波器阶数
p_tmp = p
if np.size(p)>1:
p = max(p)
p_lo = np.setdiff1d(p_tmp,p)
#构造滤波器矩阵和带宽向量
P_lu = pascal(p+1,kind='lower',exact=True)
signalt = np.empty((p+1,))
signalt[::2] = 1
signalt[1::2] = -1
coeffs = P_lu[-1,:]*signalt
#差分方程的线性系统
A = sparse.spdiags((np.ones((n_t,1))*coeffs).transpose(),np.arange(0,p+1),n_t-p,n_t)
#引入低阶方程以将边界条件设置为零
pp = np.size(p_lo)
A_pre = sparse.csr_matrix((pp,n_t), dtype=None) #sparse(pp,n_t)
A_pre[:,0:p+1] = P_lu[p_lo,0:p+1]
A = sparse.vstack([A_pre, A, A_pre[-1::-1,-1::-1]])
s = np.arange(0,p+1)
sgn = np.power(-1,s)
Q = np.zeros((p+1,p+1))
b = np.zeros((p+1,1))
Q[0,:] = np.ones((p+1))
b[0] = 2**(2*p-1)
for i in range(0,p):
Q[i+1,:] = np.power(s,(2*(i))) * sgn
q = np.linalg.solve(Q,b).transpose()*sgn
num = np.sqrt(2)-1
den = np.zeros((np.size(bw),1))
for qi in range(0,np.size(q)):
den = den + 2*q[0,qi]*np.cos((qi)*phi)
r = np.sqrt(num/den)
if (den <= 0).any() | (r > (np.sqrt(1/(2*q[0,0]*np.finfo(float).eps)))).any():
raise Warning(&#39;Ill-conditioned B-matrix selectivity bandwidth is too small.&#39;)
R = sparse.spdiags(r.transpose(),0,n_t,n_t)
B = (A.dot(R)).transpose().dot(A.dot(R)) + sparse.eye(n_t)
del A, A_pre, R, bw, phi, num, den, f
if multiord:
nn = n_t*n_ord
diags = list(range(-p,p+1))
diags_B = np.zeros((B.shape[0],len(diags)))
for i in range(0,len(diags)):
if diags==0:
diags_B[:,i] = B.diagonal(diags)
elif diags>0:
diags_B[:-diags,i] = B.diagonal(diags)
elif diags<0:
diags_B[:diags,i] = B.diagonal(diags)
diags_B_r= np.tile(diags_B.T,(1,n_ord))
BB_D = sparse.diags(diags_B_r,diags,shape=(nn,nn))
bl_U = int((n_ord**2 - n_ord)/2)
ii_U = np.zeros((n_t,bl_U))
jj_U = np.zeros((n_t,bl_U))
cc_U = np.zeros((n_t,bl_U),dtype = np.float64)
m = 0
for ki in range(0,n_ord):
for kj in range((ki+1),n_ord):
ii_U[:,m] = (ki)*n_t + np.arange(0,n_t)
jj_U[:,m] = (kj)*n_t + np.arange(0,n_t)
cc_U[:,m] = np.real(np.conj(c[:,ki])*c[:,kj])
m = m + 1
BB_U = sparse.csr_matrix((cc_U.flatten(),(ii_U.flatten(),jj_U.flatten())),shape=(nn,nn))
BB = BB_D + BB_U + BB_U.transpose()
cy = (np.conj(c.T.reshape(-1,1)).T*np.tile(y,(n_ord))).T
del diags_B, B, BB_D, BB_U, ii_U, jj_U, cc_U
if silent==False:
print(&#39;Solving sparse Ax=b, as single precision complex&#39;)
if multiord:
if solver==&#39;scikits-spsolve&#39;:
from scikits import umfpack
xx = 2 * umfpack.spsolve(BB,cy)
else:
xx = linalg.spsolve(BB,cy,use_umfpack=False)
# xx = bicg(BB,cy)
x = 2 * xx.reshape(n_ord,-1).T
else:
x = np.zeros((n_t,n_ord),dtype=np.complex64)
for ki in range(0,n_ord):
cy_k = np.conj(c[:,ki])*y
if solver==&#39;scikits-spsolve&#39;:
from scikits import umfpack
x[:,ki] = 2 * umfpack.spsolve(B,cy_k)
else:
print(&#39;dtype B: &#39;,B.dtype)
# x[:,ki] = 2 * linalg.lgmres(B,cy_k)
x[:,ki] = 2 * linalg.spsolve(B,cy_k,use_umfpack=False)
return x,c,r
def lil_repeat(S, repeat):
shape=list(S.shape)
if isinstance(repeat, int):
shape[0]=shape[0]*repeat
else:
shape[0]=sum(repeat)
shape = tuple(shape)
new = sparse.lil_matrix(shape, dtype=S.dtype)
new.data = S.data.repeat(repeat) # flat repeat
new.rows = S.indices.repeat(repeat)
return new下面进行验证,首先设置一些基本参数,例如采样频率,时间项等
fs = 12000
T = 50
dt = 1/fs
t = np.linspace(0,(T),np.int64((T-dt)/dt+1)).transpose()
N = t.size然后构造第1个非平稳成分
A0 = 2*np.hstack([np.linspace(0.5,1,np.floor(N/2).astype(np.int64())), np.linspace(1,0.5,np.ceil(N/2).astype(np.int64()))])
f0 = (0.2*fs - 0.1*fs*np.cos(4*np.pi*t/T)).reshape(-1,1)
phi0 = 2*np.pi*np.cumsum(f0)*dt+3*t/max(t)
y0 = A0*np.cos(phi0)构造第2个非平稳成分
A1 = np.hstack([np.linspace(0.5,1,np.floor(N/2).astype(np.int64())), np.linspace(1,0.5,np.ceil(N/2).astype(np.int64()))])
f1 = (0.2*fs - 0.1*fs*np.cos(np.pi*t/T)).reshape(-1,1)
phi1 = 2*np.pi*np.cumsum(f1)*dt
y1 = A1*np.cos(phi1)构造第3个非平稳成分
As1 = np.ones(N)
fs1 = 0.2*fs*np.ones((N,1))
phis1 = 2*np.pi*np.cumsum(fs1)*dt
ys1 = As1*np.sin(phis1)加点白噪声干扰
e = 1.5*np.random.rand(np.size(y1))构造试验用复合信号
y = y0+ y1 + ys1 + e执行Void-Kalman滤波
p = 2
bw = fs/12000
t1=time.time()
(x,c,r) = vkf(y,fs,np.hstack([f0, f1, fs1]),p=p,bw=bw)
print(&#39;elaspsed time: {}&#39;.format(time.time()-t1))
xreal = np.real(x*c)显示白噪声
w = y-np.sum(xreal,1)幅值与相位
Amplitude = np.abs(x)
Phase = np.log(x).imag作图
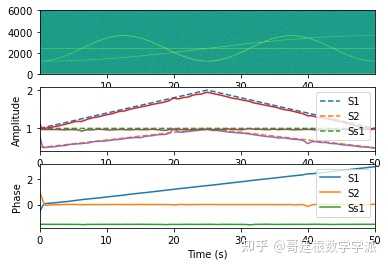
fig,ax = plt.subplots(nrows=3)
ax[0].specgram(y,round(fs/16),Fs=fs)
ax[1].plot(t,np.vstack((A0,A1,As1)).T,&#39;--&#39;)
ax[1].plot(t,Amplitude)
ax[1].set_xlim([min(t),max(t)])
ax[2].plot(t,Phase)
ax[2].set_xlim([min(t),max(t)])
ax[2].set_xlabel(&#39;Time (s)&#39;)
ax[1].set_ylabel(&#39;Amplitude&#39;)
ax[2].set_ylabel(&#39;Phase&#39;)
ax[1].legend([&#39;S1&#39;,&#39;S2&#39;,&#39;Ss1&#39;],loc=&#39;upper right&#39;)
ax[2].legend([&#39;S1&#39;,&#39;S2&#39;,&#39;Ss1&#39;],loc=&#39;upper right&#39;)
 |
|

 /3
/3 

 浙公网安备33010802005999号
浙公网安备33010802005999号 


 2026庆【网站十三周
2026庆【网站十三周 2025庆【网站十二周
2025庆【网站十二周 2024庆中秋、迎国庆
2024庆中秋、迎国庆 2024庆【网站十一周
2024庆【网站十一周 2023庆【网站十周年
2023庆【网站十周年 2022庆【网站九周年
2022庆【网站九周年

 雷达卡
雷达卡 发表于 2025-3-13 14:10
发表于 2025-3-13 14:10


 提升卡
提升卡


