用户名
UID
Email
密码
记住
立即注册
找回密码
只需一步,快速开始
微信扫一扫,快速登录
开启辅助访问
收藏本站
快捷导航
门户
Portal
社区
BBS
资讯
会议
市场
产品
问答
数据
专题
帮助
签到
每日签到
企业联盟
人才基地
独立实验室
产业园区
投资机构
检验科
招标动态
供给发布
同行交流
悬赏任务
共享资源
VIP资源
百科词条
互动话题
导读
动态
广播
淘贴
法规政策
市场营销
创业投资
会议信息
企业新闻
新品介绍
体系交流
注册交流
临床交流
同行交流
技术杂谈
检验杂谈
今日桔说
共享资源
VIP专区
企业联盟
投资机构
产业园区
业务合作
投稿通道
升级会员
联系我们
搜索
搜索
本版
文章
帖子
用户
小桔灯网
»
社区
›
A、行业资讯区
›
同行交流
›
时空联合规划 vs 时空分离规划算法
图文播报
2026庆【网站十三周
2025庆【网站十二周
2024庆中秋、迎国庆
2024庆【网站十一周
2023庆【网站十周年
2022庆【网站九周年
返回列表
查看:
12604
|
回复:
0
[讨论]
时空联合规划 vs 时空分离规划算法
[复制链接]
心中u你
心中u你
当前离线
金桔
金币
威望
贡献
回帖
0
精华
在线时间
小时
雷达卡
发表于 2024-12-25 23:00
|
显示全部楼层
|
阅读模式
登陆有奖并可浏览互动!
您需要
登录
才可以下载或查看,没有账号?
立即注册
×
运动规划的本质是解一个复杂的优化问题,即寻找又安全又舒适的最优轨迹。时空联合规划(space-time joint planning)直接在三维时空下进行横纵联合决策和优化。时空联合规划的特点是路径和速度曲线同时作为优化问题的变量,所以得到的是二者的最优组合,而不仅仅是在某个给定速度曲线下的最优路径或某个给定路径下的最优速度。
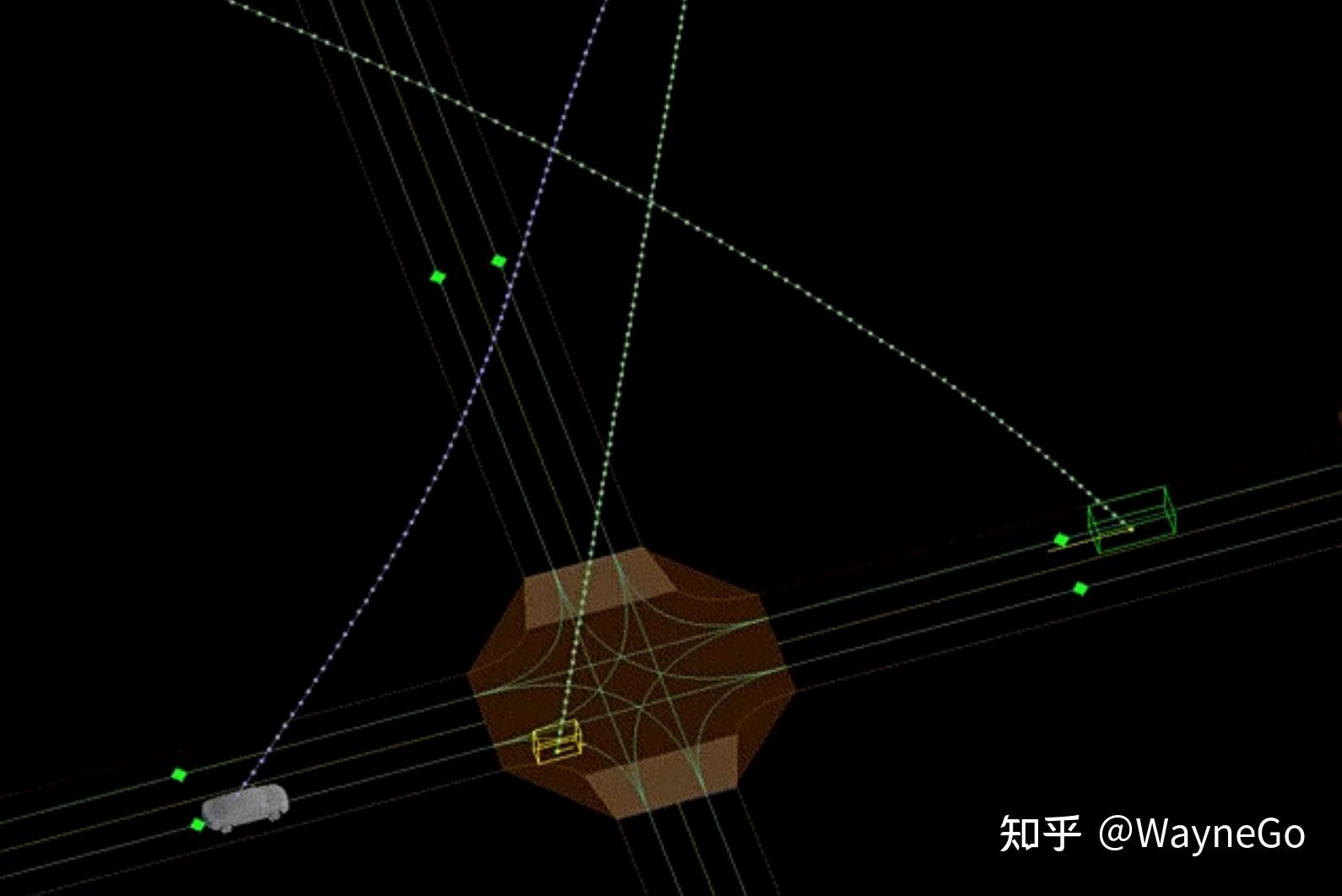
Step 1:将三维时空下的障碍物决策分为四类:follow,overtake,nudge left,nudge right。数值优化效果的重要决定因素是初始解的质量。
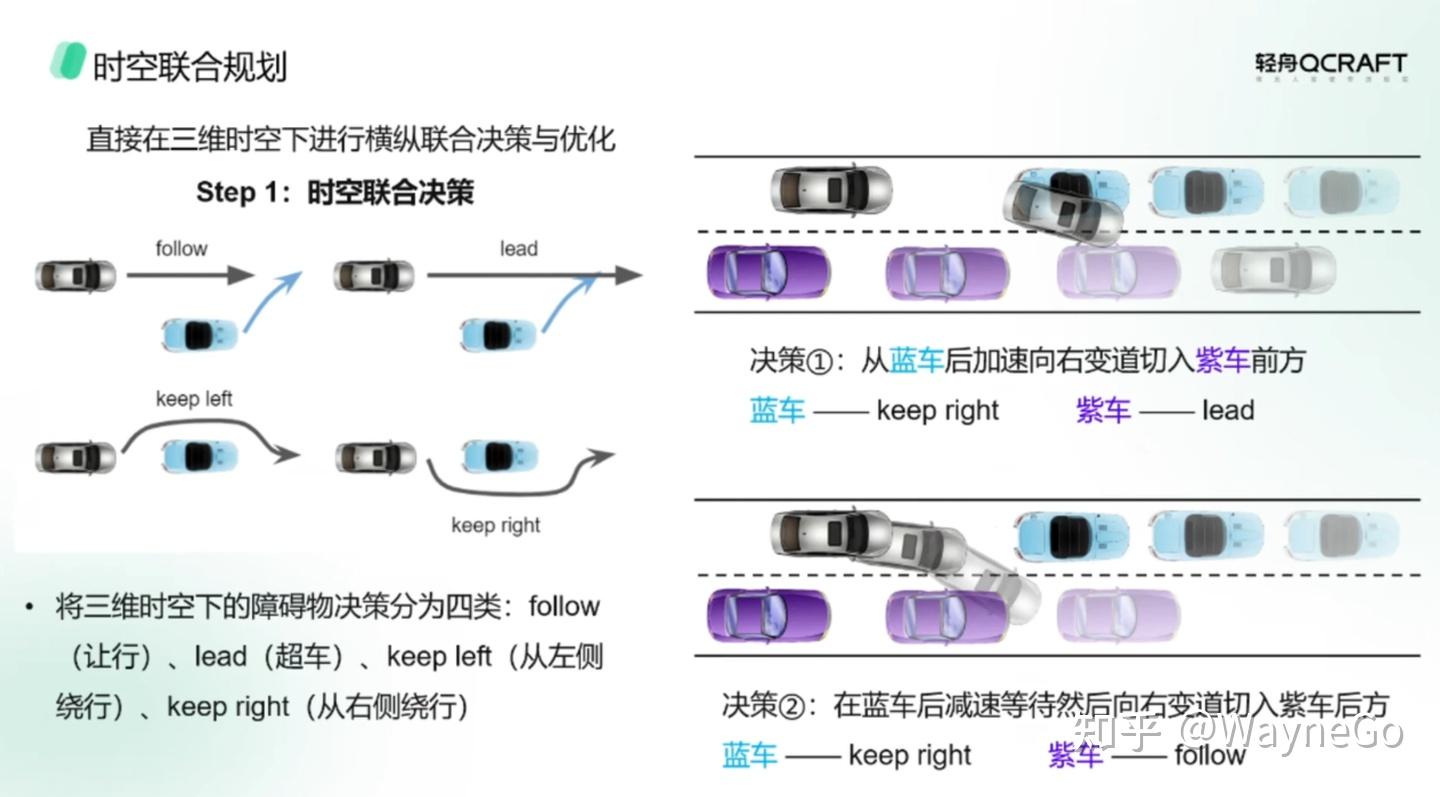
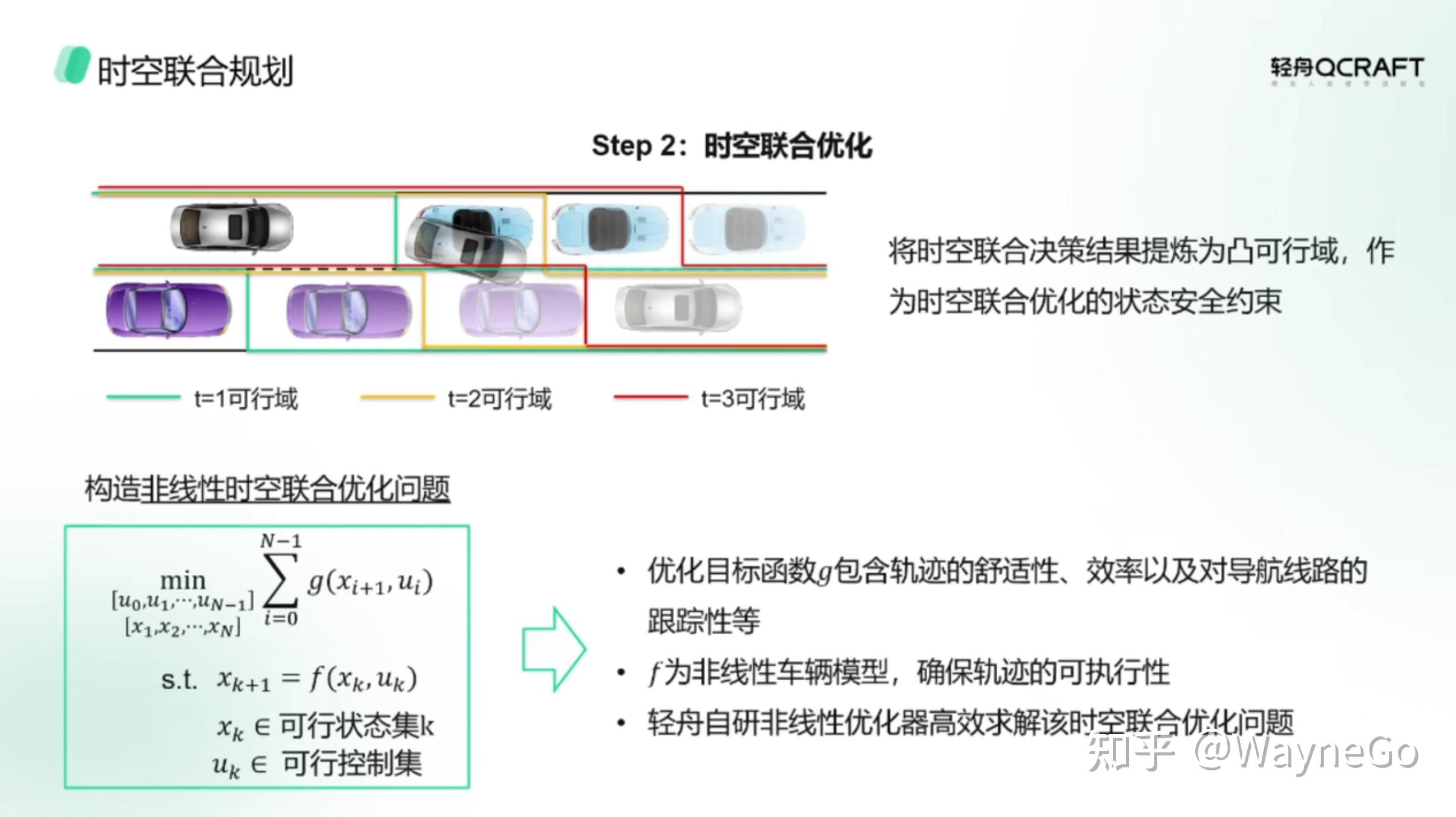
Step 2:将时空联合决策结果提炼为凸可行域,作为时空联合优化的状态安全约束,通过ILQR方式求解
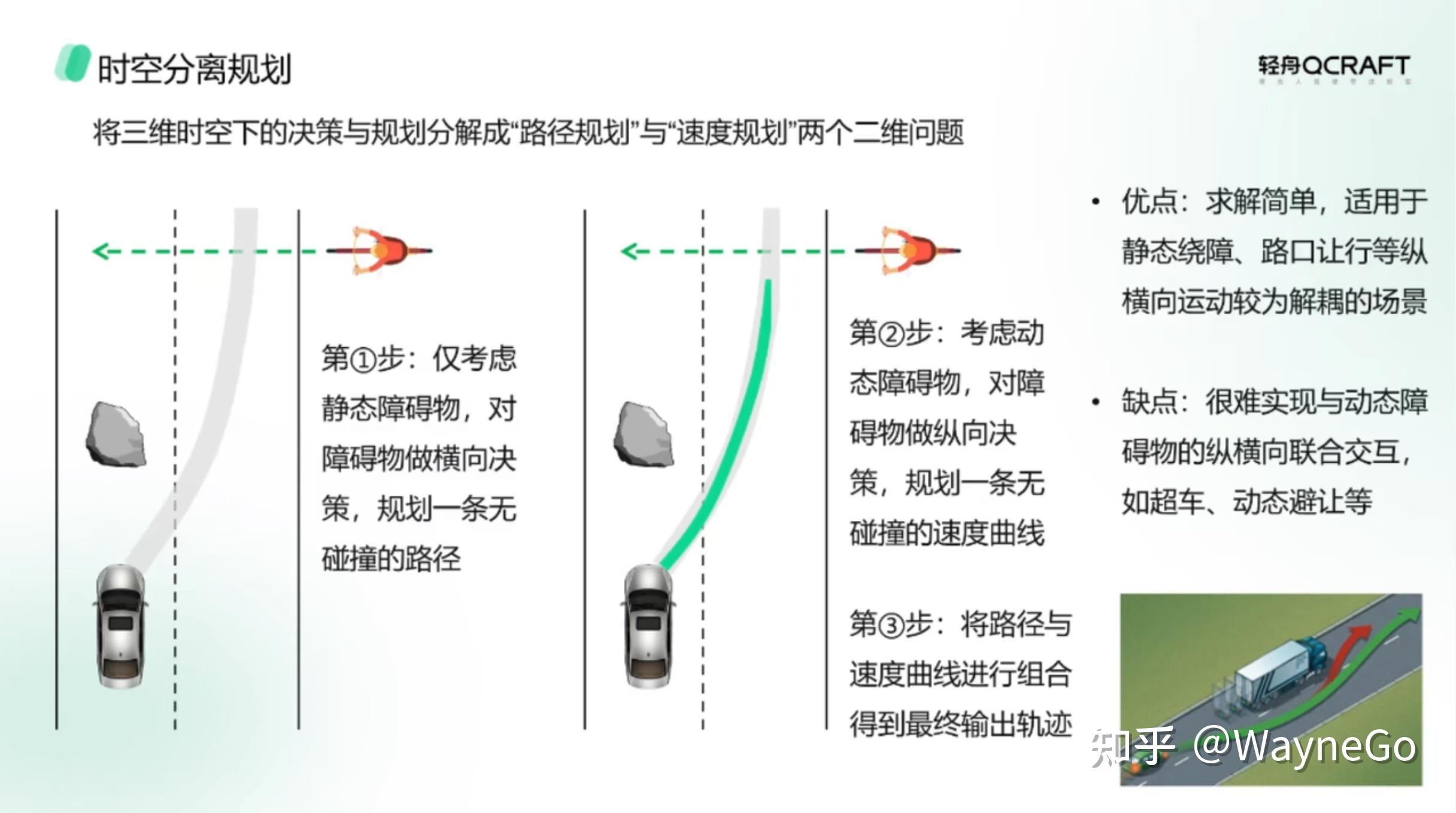
时空分离决策算法是把对轨迹的拆分分为两个子问题,即路径规划(path planning)和速度规划(speed planning)。
路径规划对应于横向控制(方向盘角度),表达形式通常是Frenet坐标系的横向偏移量l对弧长s的函数,也就是路径(path);路径描述的是一个纯粹的空间形状,与时间无关。
速度规划对应于纵向控制(刹车/油门踏板开度),表达形式通常是s对时间t的函数,即速度曲线(speed profile);速度曲线描述的是在路径上的进度,与路径的空间形状无关。
时空联合相比时空分离决策规划的优缺点如下:
优点:
时空联合考虑,可以实现更高的复杂场景下与动态障碍物交互的性能上界(理论上)
自车解空间完备性更好,时空分离在path生成时候丢失了一些解
缺点:
三维DP搜索复杂,调试不方便
软件架构更加复杂
参考资料:
扬奇直播课堂:《自动驾驶中的决策规划技术》轻舟智航_哔哩哔哩_bilibili
大方:「QBlog 07」时空联合规划技术在自动驾驶中的应用
https://arxiv.org/pdf/2207.00198.pdf
深蓝学院:MARC:一种安全又高效的时空联合规划的方法
原文地址:https://zhuanlan.zhihu.com/p/692605942
回复
使用道具
举报
提升卡
返回列表
发表回复
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
立即注册
本版积分规则
发表回复
回帖后跳转到最后一页
关闭
官方推荐
/3
AI助手<小桔子>来了!
欢迎来交流,可以回答IVD行业各类问题!
查看 »
IVD业界薪资调查(月薪/税前)
长期活动,投票后可见结果!看看咱们这个行业个人的前景如何。请热爱行业的桔友们积极参与!
查看 »
小桔灯网视频号开通了!
扫描二维码,关注视频号!
查看 »
返回顶部
快速回复
返回列表
客服中心
搜索
洽谈合作
关注微信
微信扫一扫关注本站公众号
个人中心
个人中心
登录或注册
业务合作
-
投稿通道
-
友链申请
-
手机版
-
联系我们
-
免责声明
-
返回首页
Copyright © 2008-2024
小桔灯网
(https://www.iivd.net) 版权所有 All Rights Reserved.
免责声明: 本网不承担任何由内容提供商提供的信息所引起的争议和法律责任。
Powered by
Discuz!
X3.5 技术支持:
宇翼科技
浙ICP备18026348号-2
浙公网安备33010802005999号
快速回复
返回顶部
返回列表

 /3
/3 

 浙公网安备33010802005999号
浙公网安备33010802005999号 


 2026庆【网站十三周
2026庆【网站十三周 2025庆【网站十二周
2025庆【网站十二周 2024庆中秋、迎国庆
2024庆中秋、迎国庆 2024庆【网站十一周
2024庆【网站十一周 2023庆【网站十周年
2023庆【网站十周年 2022庆【网站九周年
2022庆【网站九周年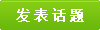

 雷达卡
雷达卡 发表于 2024-12-25 23:00
发表于 2024-12-25 23:00


 提升卡
提升卡


