金桔
金币
威望
贡献
回帖0
精华
在线时间 小时
|
在上一篇文章《功能安全的架构设计(二)》(功能安全的架构设计(二) - 知乎 (zhihu.com))中我们谈了谈常见的MooN(D)架构表现形式及结构特点, 并就每种MooN(D)架构的结构特点与是否能实现fail-safe和fail-operational的系统作了个简单的辨析。
此篇我们来谈谈《功能安全的架构设计(一)》(功能安全的架构设计(一) - 知乎 (zhihu.com))一文中提到的另一种架构概念——指定架构(designated architecture), 看看这种架构概念和MooN(D), fail-safe及fail-operational这些架构概念又有什么区别与联系。
- Designated architecture — 指定架构
在《功能安全的架构设计(一)》一文中我们提到过这个这是ISO 13849-1(机械安全控制系统的安全设计原则)标准中的一个概念,机械设备安全控制系统(SCS)的架构形式是一种对机械系统性能等级(PL)有重大影响的关键特征, 由于架构的表现形式多样, ISO 13849根据机械系统的特点给不同形式的控制系统架构制定了典型的安全相关框图, 这些典型的框图被称为指定架构(designated architecture)。
ISO 13849中给出了五类指定架构(Category B, 1, 2, 3, 4), 分别用于满足不同PL等级系统的要求。
接下来简单介绍下这五类指定架构。
这类架构对应系统没有诊断覆盖率的要求 (即DC= 0),其结构通常是单通道的,由于与 CCF无关,该安全类别不考虑 CCF。
根据上图,B类架构系统可以达到的最高性能等级为 PL=b。
单通道设计意味着单个故障即可导致安全功能的丧失,该类架构是机械系统指定架构里的基础架构。其对应架构模型如下:
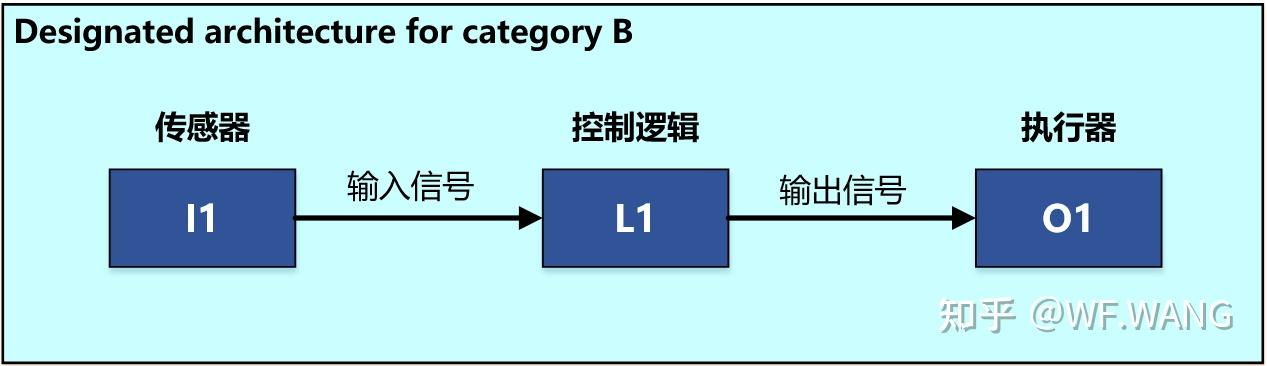
架构特点:单通道设计
其中,
I: 输入设备,如传感器(如,行程开关);
L: 逻辑单元,如安全继电器;
O: 输出设备,如接触器;
采用1类架构的控制系统其安全相关部件必须采用经过验证的/久经考验的组件(well-tried component),此外还必须严格遵守经过验证的安全原则 (见 ISO13849-2)。
1类架构系统可以实现的最高性能等级为 PL=c。其对应架构模型如下:
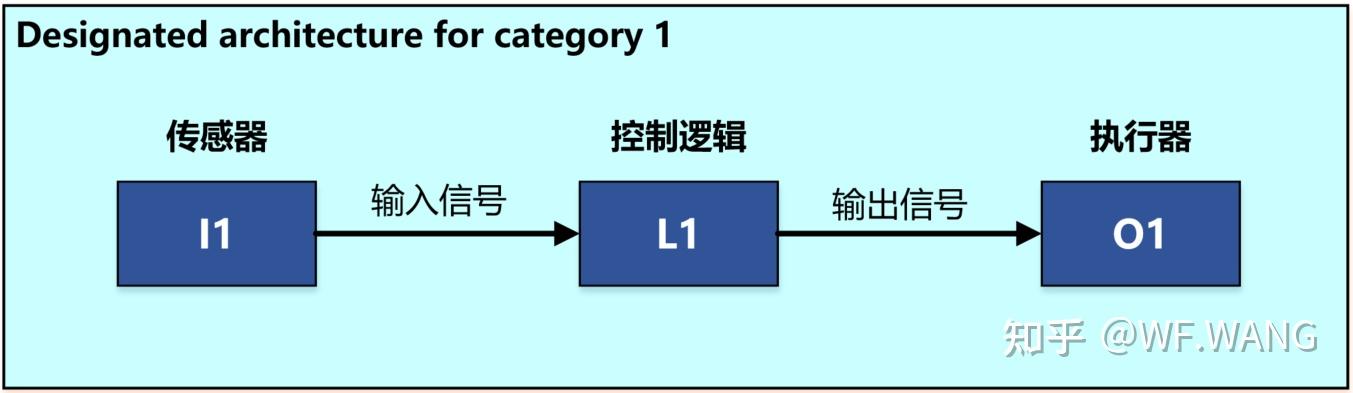
架构特点:
> 单通道设计;
> 采用经过验证的/久经考验的组件;
"经过验证的/久经考验的组件"(well-tried component)是指:
a) 过去广泛使用,并在类似应用中取得成功,或
b) 使用证明其在安全相关应用中的适用性和可靠性的原理进行制造和验证。
如果新开发的组件和安全原则满足b)的条件,则可以认为它们相当于“经过验证的/久经考验的” (well-tried)。
Jet Note: 1类架构和B类架构一样也是单通道系统架构,对单点故障非常敏感,两者区别在于1类架构强调对应的系统中要使用"经过验证的/久经考验的组件"(well-tried component),也即1类架构系统对于组件的可靠性指标(e.g. 失效率)要求更高。
2类架构的控制系统其安全相关部件必须通过机器的控制器在合适的间隔时间进行测试。
出现危险性故障的情况下,只有在下一个安全功能要求出现之前进行故障检测测试,才能获得有效的 (或者说有意义的)故障检测结果。因此,要求的测试速度必须比安全功能的要求速度快 100倍。
对于安全功能的测试,机器的控制器必须在以下条件下完成:
> 机器起动期间;
> 各种危险状态出现之前,例如新的机器循环开始时,或者其他动作开始等。
测试结果:
1)检测到某个故障时,必须产生合适的故障响应;
2)检测到某个故障时,运行必须被禁止。
无论什么情况下,故障响应都必须使机器进入某种安全状态。故障排除之后,机器才可以继续正常运行。若无法进入安全状态 (例如继电器触头粘接),则必须给出危险警告信息。
2类架构系统可以实现的最高性能等级为 PL=d。其对应架构模型如下:
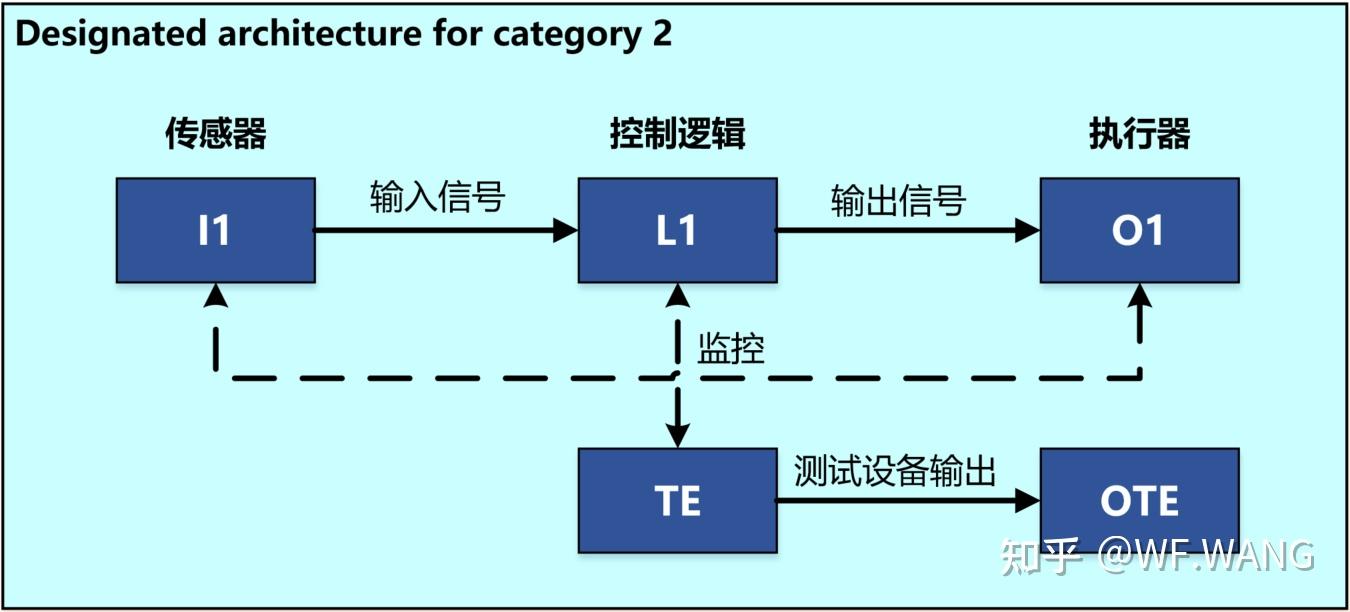
其中:
TE: test equipment 测试设备
OTE: output of TE 测试设备的输出
虚线:表示合理可行的故障检测
架构特点:
> 单通道设计;
> 采用测试设备进行功能监控。
Jet Note: 2类架构依然是单通道架构,但从2类架构开始,明确要求系统中要加入“检查装置”(checking equipment)用于检测安全功能的各种故障并控制系统进入安全状态。另外,相较于Category 1, 功能通道/处理单元的MTTFd值比Category 1小一个量级,同时Category 2对“测试装置"的检测频率要求大于处理单元的MTTFd值一半、测试频率要大于需求率的100倍、诊断覆盖率至少为60%,并且要考虑共因失效,这些在Category 1中都没有明确提出。
3类架构的控制系统其所采用的设计必须可以确保单一故障不会导致安全功能的丧失。无论在什么情况下,必须在下一个安全功能要求执行时 (或之前)完成单一故障的检测。如果无法检测某种故障,则这类故障的累积可能会导致安全功能的丧失。
3类架构系统可以实现的最高性能等级为 PL=e。其对应架构模型如下:
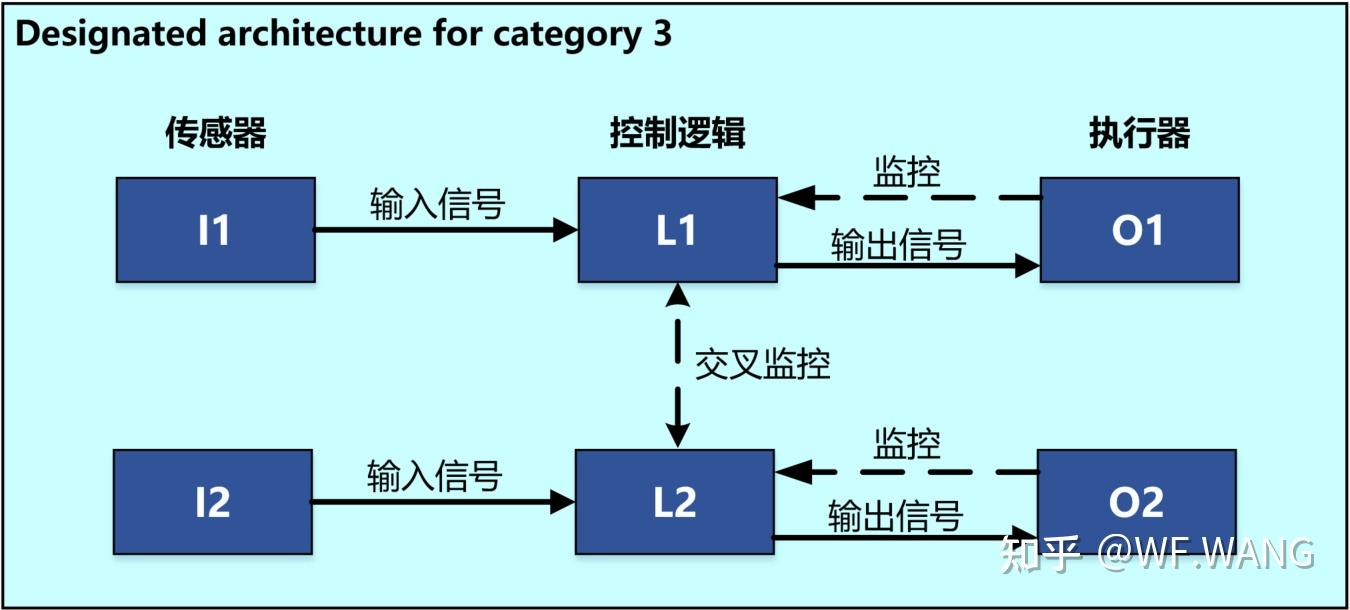
其中:
> I1和 I2:传感器 1和 2(例如两个带有强制断开触头的行程开关);
> L1和 L2:逻辑单元 1和 2(例如已经集成了两个微处理器的某种型号的安全继电器;
> O1和 O2:执行器 1和 2(例如两个带有强制断开触头的接触器);
架构特点:
> 采用冗余架构设计;
> 传感器监控 (同步输入监控);
> 使能回路 (即安全输出回路)监控 (监控和反馈回路的比较);
Jet Note:从3类架构开始对应系统需要采用冗余架构设计,是一种双通道系统,且此类架构从输入到输出路径上的主要构成要素(传感器、逻辑处理单元、执行器)都要实施对应的监控。
4类架构的控制系统其所采用的设计必须可以确保单一故障不会导致安全功能的丧失。必须在下一个安全功能要求执行时 (或之前)完成单一故障的检测。如果无法检测某种故障,则这类故障的累积不得导致安全功能的丧失。
4类架构系统可以实现的最高性能等级为 PL=e。其对应架构模型如下:
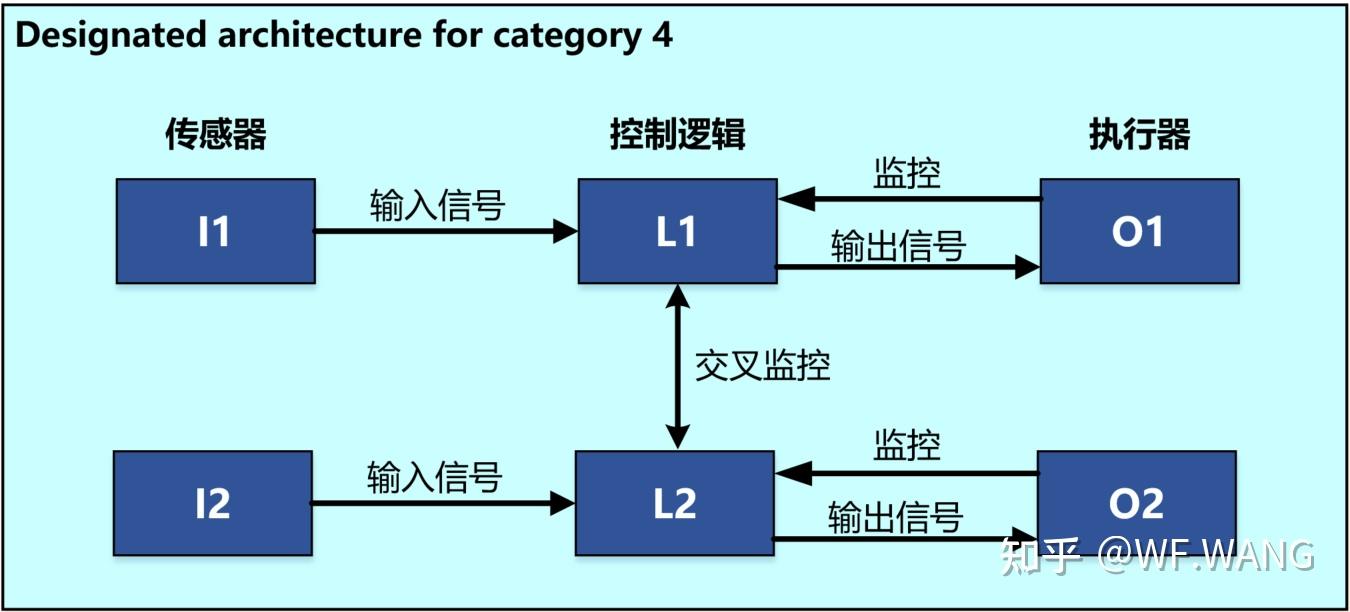
由上图可看出4类架构的构成和3类架构的构成一样, 两者的关系有点类似1类和B类架构之间的关系。
架构特点:
> 采用冗余架构设计;
> 传感器监控 (同步输入监控);
> 使能回路 (即安全输出回路)监控 (监控和反馈回路的比较);
> 所有子系统都具备高诊断覆盖率;
Category 4指定架构中用于监测的实线表示诊断覆盖率(DC)高于Category 3指定架构中的诊断覆盖率。
Jet Note: Category 4系统指定架构在Category 3的基础上,对单个故障的监测要全覆盖,对“累计故障”也要考虑,但只考虑两个单独故障累计导致安全功能丧失的组合,另外,4类系统指定架构总的诊断覆盖率DCavg为high, 对每一通道的MTTFD要求都为high,最高能满足PL e的系统设计要求。
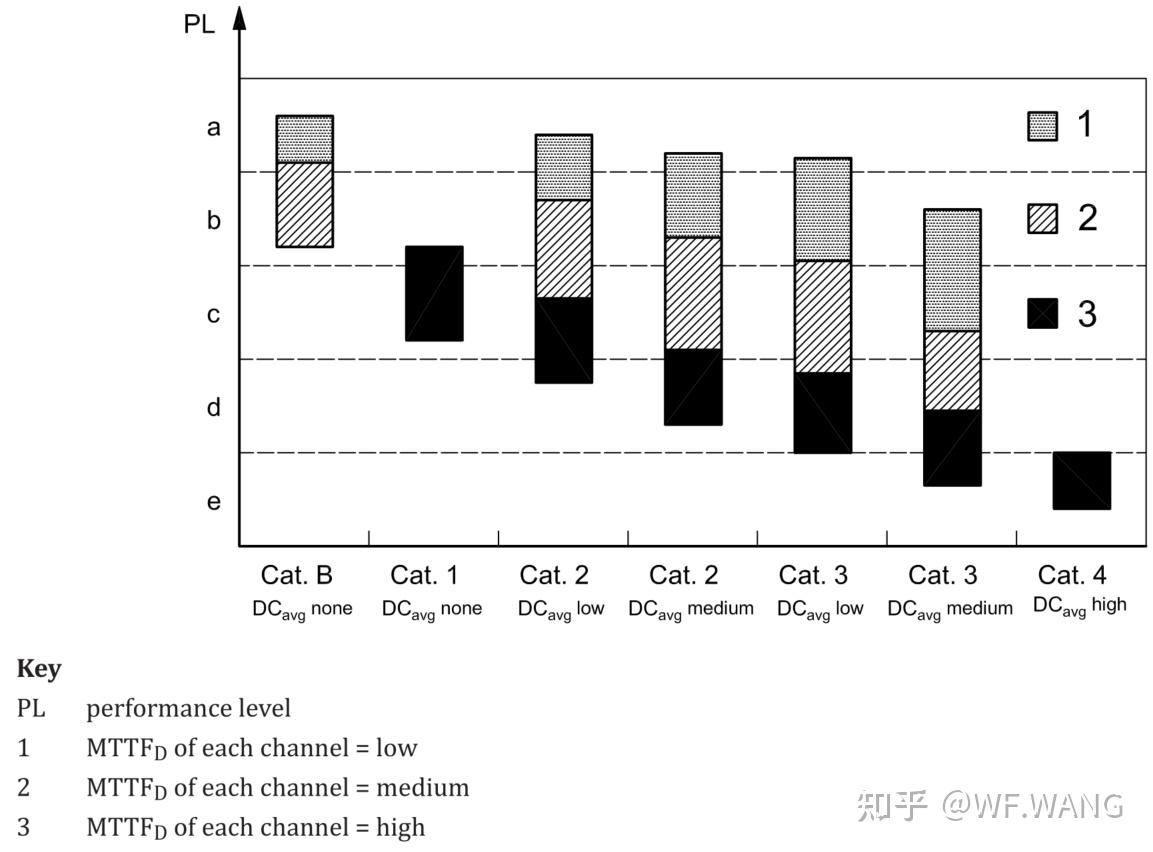
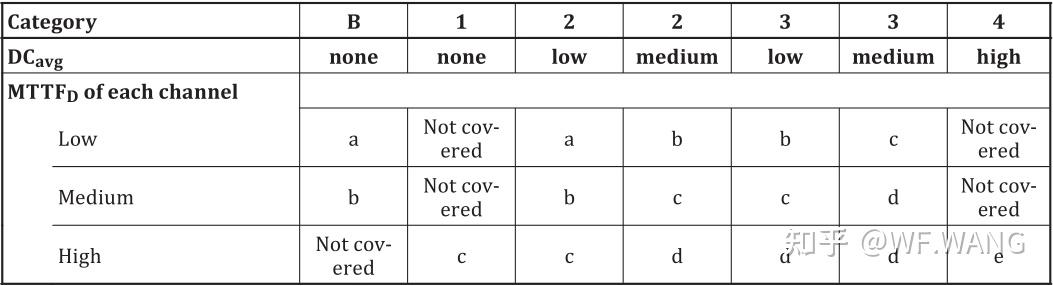
系统的PL等级与系统的架构类别(Category x)、系统的平均诊断覆盖率(DCavg)和平均危险失效间隔时间(MTTFd)这些系统属性有关,他们之间的关系可参考下表。
Q: 综上并根据《功能安全的架构设计(二)》(功能安全的架构设计(二) - 知乎 (zhihu.com))一文中关于MooN(D)架构的介绍,这里的指定架构(designated architecture)是不是看起来有些眼熟?它们和MooN(D)架构有哪些对应关系?每种指定架构是能实现fail-safe的还是fail-operational呢?
以上关于机械安全领域的指定架构(designated architecture)的概念及其表现形式就和大家谈到这里,详细内容可参考ISO 13849的标准原文。
参考:
[1] ISO 13849-1
[2] 机械安全技术及应用 |
|

 /3
/3 

 浙公网安备33010802005999号
浙公网安备33010802005999号 


 2026庆【网站十三周
2026庆【网站十三周 2025庆【网站十二周
2025庆【网站十二周 2024庆中秋、迎国庆
2024庆中秋、迎国庆 2024庆【网站十一周
2024庆【网站十一周 2023庆【网站十周年
2023庆【网站十周年 2022庆【网站九周年
2022庆【网站九周年

 雷达卡
雷达卡 发表于 2025-2-18 17:41
发表于 2025-2-18 17:41


 提升卡
提升卡